Při soustavném výkladu geometrie dnes postupujeme tak, že vycházíme z několika základních tvrzení - tzv. axiomů - o několika základních pojmech - tzv. primitivních pojmech a jejich vztazích - tzv. primitivních vztazích. Na jejich základě dokazujeme tvrzení další - tzv. věty - a zavádíme další pojmy pomocí tzv. definic. Takovému postupu při budování matematické teorie říkáme axiomatická metoda. Tuto metodu poprvé v historii použil řecký matematik Eukleidés ve 3. stol. př. n. l., kdy ve svém díle Stoichea (Základy) tímto způsobem vybudoval geometrii. Jeho práce dnes již sice nesnese současná matematická měřítka (důsledně axiomatický výklad geometrie podal až r. 1899 německý matematik Hilbert), ale prostor, ve kterém dnes běžně v geometrii pracujeme, dnes nese jméno zakladatele axiomatické metody. Nazýváme ho euklidovským prostorem (podle pozdějšího latinského přepisu řeckého Eukleides = Euklides). Základními pojmy v tomto prostoru jsou bod, přímka a rovina základními vztahy jsou „ležet na (v)“ a „procházet“
Axiomy euklidovského prostoru
lze rozdělit do několika skupin:
I. Axiomy incidence:
I1: Každými dvěma různými body prochází právě jedna přímka
I2: Na každé přímce leží alespoň dva různé body
I3: Existují alespoň tři body, které neleží na jedné přímce
I4: Každými třemi body, které neleží na jedné přímce, prochází rovina
I5: Jestliže bod leží na přímce a přímka v rovinou, pak bod leží v rovině
I6: Jestliže dva různé body leží v rovině, pak v této rovině leží přímka, která jimi prochází
I7: Jestliže dvě roviny mají společný bod, mají společné alespoň dva různé body
I8: Existují alespoň čtyři body, které neleží v téže rovině
I9: V každé rovině leží alespoň jeden bod.
II. Uspořádání:
U1: Žádný bod nepředchází sám sobě
U2: Jsou-li ![]() dva různé body, pak
buď
dva různé body, pak
buď ![]() předchází
předchází ![]() , anebo
, anebo ![]() předchází
předchází ![]() .
.
U3:
Leží-li tři různé body ![]() na téže přímce a
na téže přímce a ![]() předchází
předchází ![]() a současně
a současně ![]() předchází
předchází ![]() , pak
, pak ![]() předchází
předchází ![]() .
.
U4: Jsou-li
![]() dva různé body, pak
existuje bod
dva různé body, pak
existuje bod ![]() tak, že
tak, že ![]() předchází
předchází ![]() a
a ![]() předchází
předchází ![]() .
.
III. Spojitost
D: Existuje alespoň jedna spojitá úsečka
IV. Shodnost
S1: Ve shodném zobrazení je obrazem bodu bod, obrazem přímky přímka, obrazen roviny rovina
S2: Shodné zobrazení zachovává incidenci
S3: shodné zobrazení zachovává usouřádání
S4:
Složení dvou shodností je shodnost. Skládání shodností je komutativní a
asociativní. Ke každé shodnosti ![]() existuje shodnost
existuje shodnost ![]() tak, že složením
shodností
tak, že složením
shodností ![]() ;
; ![]() je identita.
je identita.
S5: Jsou-li ![]() resp.
resp. ![]() dvě trojice bodů,
z nichž ani jedna neleží na téže přímce, pak existuje právě jedno shodné
zobrazení, které zobrazuje
dvě trojice bodů,
z nichž ani jedna neleží na téže přímce, pak existuje právě jedno shodné
zobrazení, které zobrazuje ![]() na bod
na bod ![]() , polopřímku
, polopřímku ![]() na polopřímku
na polopřímku ![]() a polorovinu
a polorovinu ![]() na polorovinu
na polorovinu ![]()
V.
Rovnoběžnost
E: Každým bodem ![]() , který neleží na přímce
, který neleží na přímce ![]() lze vést nejvýše jednu
rovnoběžku s přímkou
lze vést nejvýše jednu
rovnoběžku s přímkou ![]() .
.
Z těchto axiomů je možno odvodit všechna známá tvrzení euklidovské geometrie, tj. geometrie, kterou jsme až dosud studovali. Velmi snadno můeme např. dokázat následující větu:
1. Věta: Jestliže dvě roviny mají společný bod, pak mají společnou celou přímku.
Důkaz: Jestliže dvě roviny mají společný bod, pak podle axiomu I7 nají soulečné alespoň dva různé body. Podle axiomu I1 existuje přímka, kerá jimi prochází. Body leží v obou rovinách, podle axiomu I6 pak v obou rovinách leží i přímka, která jimi prochází.
Všimněte si, že v axiomech není ani slovo o tom, co je bod, co je přímka a co je rovina. Bod si pouze představujeme jako „bezrozměrnou tečku“, přímku jako „nekonečně tenkou, nekonečně dlouhou a rovnou čáru“, rovinu jako „nekonečně tenkou, nekonečně velkou a rovnou plochu.“ Těmito představami jsme si vytvořili metematický model bodu, přímky a roviny. Axiomy nás však k těmto představám nenutí. Bod, přímku a rovinu si můžeme představit i jinak, pokud naše představy mají předepsané vlastnosti.
Práce v euklidovském prostoru je však v mnoha případech velmi nepohodlná a zdlouhavá. Pracujeme-li např. se dvěma přímkami v rovině, musíme rozlišovat, zda existuje společný bod, anebo ne, rovněž u rovin může existovat společná přímka anebo nemusí. Například při definici středové kolineace, kterou uvedeme dále, bychom museli rozlišovat hned šest případů. Rovněž řešení konstrukčních úloh se liší podle toho, zda jsou zadané přímky rovnoběžné či různoběžné. Z těchto (a mnoha dalších) důvodů se v geometrii zavádí tzv. rozšířený. Je to prostor, ve kterém platí dva další axiomy:
VI. Rozšíření
euklidoivského prostoru:
R1: Každé dvě přímky, které leží v téže rovině, mají společný bod
R2: Každé dvě roviny mají společný bod.
Z axiomu R1 a věty 1 pak bezprostředně vyplývá, že každé dvě roviny v rozšířeném prostoru mají společnou přímku.
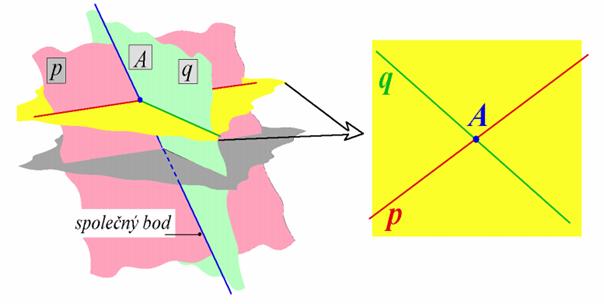
Nyní je otázkou, jak si náš rozšířený prostor a útvary v něm představit. Např. představa bodu jako „bezrozměrné tečky“ bude již vyhovovat jen u různoběžek. „Tečku“ u rovnoběžek nelze „umístit“ tak, aby jí procházely obě rovnoběžky. Je tedy třeba si vytvořit představu jinou.
Naše představa roviny bude s požadavky R1 a R2 zajímavě korespondovat v případě, když ke každé „klasické“ či „euklidovské“ představě „přidáme“ jeden rozměr. Rozšířenou rovinu si představíme jako trojrozměrný euklidovský prostor, opatřený kartézskou souřadnou soustavou. Body si představíme jako euklidovské přímky, které procházejí jejím počátkem.
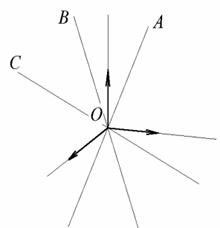
Na
připojeném obrázku vidíme představu (model) tří bodů ![]() v rozšířené
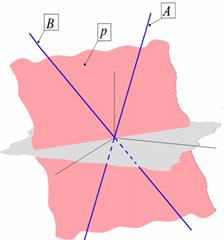
rovině. Přímky rozšířené roviny je třeba si představit jako euklidovské roviny,
které rovněž procházejí počátkem. Na obrázku vpravo vidíme model přímky
v rozšířené
rovině. Přímky rozšířené roviny je třeba si představit jako euklidovské roviny,
které rovněž procházejí počátkem. Na obrázku vpravo vidíme model přímky ![]() , která prochází dvěma různými body
, která prochází dvěma různými body ![]() .
.
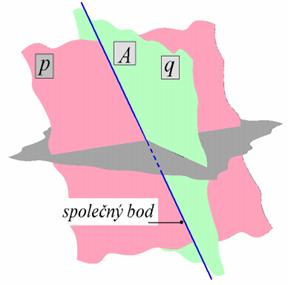
Tyto dva obrázky
pak modelují dvě přímky se společným bodem. Tyto dva obrázky se však
v něčem liší: Model společného bodu vpravo leží v rovině ![]() , kdežto model vlevo nikoli. A zde se již dostáváme ke smyslu
našeho modelu. Do posledních dvou situací sestrojme rovinu
, kdežto model vlevo nikoli. A zde se již dostáváme ke smyslu
našeho modelu. Do posledních dvou situací sestrojme rovinu ![]() . Tato rovina protne
naše modely přímek ve dvou „klasických“ různoběžných přímkách a model bodu
v jejich „klasickém“ průsečíku. Tato rovina představuje „klasickou“
euklidovskou rovinu.
. Tato rovina protne
naše modely přímek ve dvou „klasických“ různoběžných přímkách a model bodu
v jejich „klasickém“ průsečíku. Tato rovina představuje „klasickou“
euklidovskou rovinu.
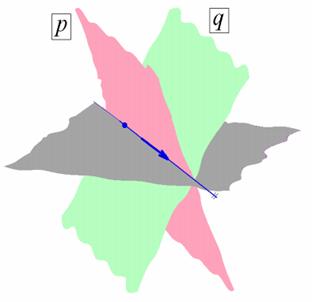
Na dalším
obrázku máme rovnoběžné přímky ![]() . Je zřejmé, že i tyto přímky mají v našem modelu
projektivní roviny společný bod. Ten je však reprezentován přímkou, jejíž
směrový vektor se „nezvedne“ z roviny
. Je zřejmé, že i tyto přímky mají v našem modelu
projektivní roviny společný bod. Ten je však reprezentován přímkou, jejíž
směrový vektor se „nezvedne“ z roviny ![]() . Přímka tak nemůže protnout rovinu
. Přímka tak nemůže protnout rovinu ![]() a v euklidovské
rovině příslušná „tečka“ neexistuje. Chceme-li bod nějakým způsobem přece jen
znázornit, zakreslujeme ho jako společný směrový vektor obou přímek.
a v euklidovské
rovině příslušná „tečka“ neexistuje. Chceme-li bod nějakým způsobem přece jen
znázornit, zakreslujeme ho jako společný směrový vektor obou přímek.

Pozor! U směrového
vektoru přímky nezáleží na orientaci ani na velikosti. Dvě rovnoběžky tedy
nemají dva společné body (či dokonce nekonečně mnoho společných bodů), ale
pouze jeden jediný. Takovému bodu říkáme nevlastní bod.
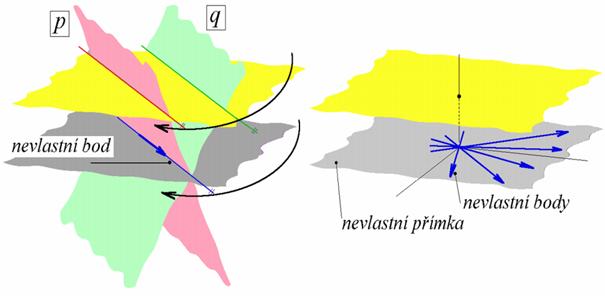
Společné
nevlastní body rovnoběžných přímek leží v našem modelu v rovině ![]() , která je na našich obrázcích vyznačena šedě. Tato rovina
rovněž prochází počátkem souřadné soustavy, takže i ona je v našem modelu
rozšířeného prostoru přímkou. Neprotíná rovinu
, která je na našich obrázcích vyznačena šedě. Tato rovina
rovněž prochází počátkem souřadné soustavy, takže i ona je v našem modelu
rozšířeného prostoru přímkou. Neprotíná rovinu ![]() , takže v euklidovském prostoru ji není možné znázornit.
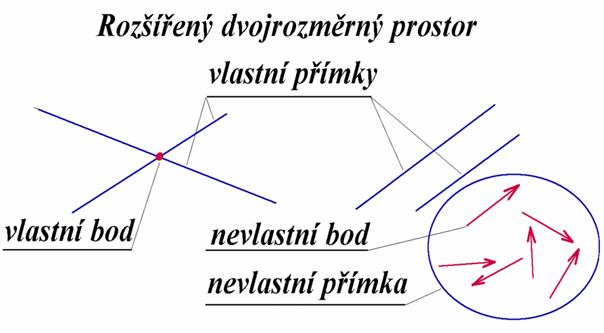
Jedná se o tzv. nevlastní přímku, na které leží všechny nevlastní body
rozšířené roviny. Rozšířená rovina tak má jednu nevlastní přímku, na které leží
všechny nevlastní body.
, takže v euklidovském prostoru ji není možné znázornit.
Jedná se o tzv. nevlastní přímku, na které leží všechny nevlastní body
rozšířené roviny. Rozšířená rovina tak má jednu nevlastní přímku, na které leží
všechny nevlastní body.
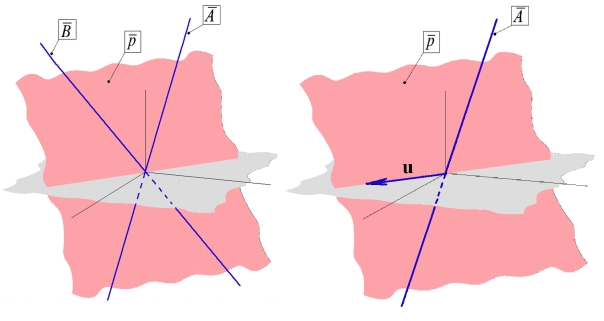
Na tomto obrázku vlevo vidíme ještě jednou vlastní přímku určenou (procházející) dvěma vlatními body. Na obrázku vpravo je rovněž přímka procházející dvěma body, jeden z nich je ovšem nevlastní. V euklidovské rovině se jedná o přímku určenou bodem a směrovým vektorem.
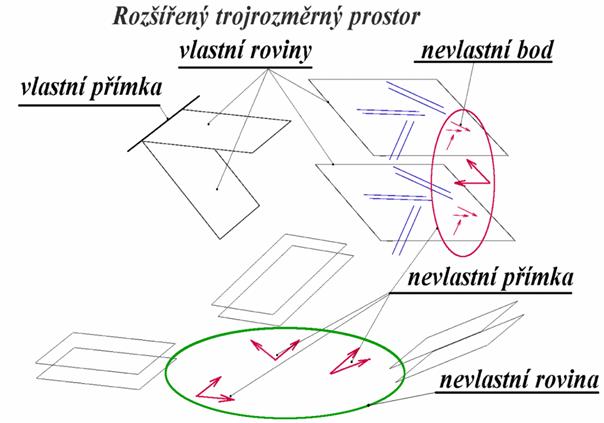
Podobné vztahy platí i v rozšířeném euklidovském prostoru. Ten již nelze znázornit výše uvedeným způsobem, protože bychom k tomu potřebovali čtyři rozměry. Nicméně zde analogicky platí:
2. Věta: Každé dvě roviny mají společnou přímku.
Společná přímka různoběžných rovin je vlastní a znázorňujeme ji běžným způsobem.
Společná přímka dvou rovnoběžných rovin je nevlastní a znázorňujeme ji jako dvojici směrových vektorů příslušných rovin – tzv. dvojsměr. Trojrozměrný rozšířený prostor má nekonečně mnoho nevlastních přímek. Všechny tyto nevlastní přímky vyplní tzv. nevlastní rovinu. Trojrozměrný rozšířený prostor má tedy jednu nevlastní rovinu, ve které leží všechny nevlastní přímky.