Princip konstrukce spojitých
analytických křivek:
Známe je z CAD systémů:
Fergusonovy křivky
Technická praxe často vyžaduje
křivky, určené tzv. řídícími body nebo o řídícím polygonem. Jednu
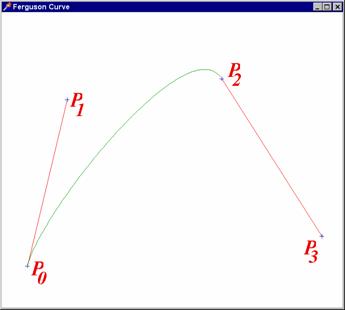
z nejjednodušších takových křivek používal od r. 1964
J. C. Ferguson. Křivka je určena dvěma krajními body ![]() ,
, ![]() a dvěma
tečnými vektory
a dvěma
tečnými vektory ![]() ,
, ![]() . Velikost těchto vektorů ovlivňuje zároveň
druhou derivaci křivky (čím je velikost větší, tím více křivka k vektoru „přimyká“).
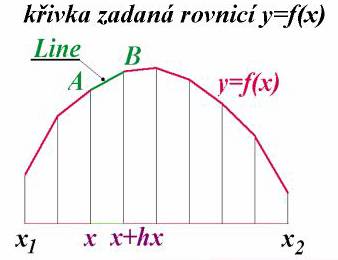
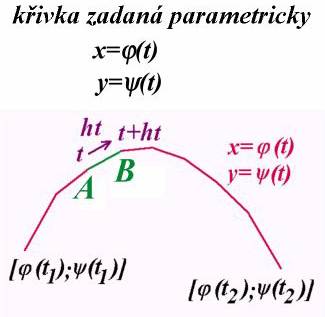
Křivka je definována parametrickými rovnicemi
. Velikost těchto vektorů ovlivňuje zároveň
druhou derivaci křivky (čím je velikost větší, tím více křivka k vektoru „přimyká“).
Křivka je definována parametrickými rovnicemi
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]()
Funkce ![]() jsou polynomy 3. stupně,
Fergusonova křivka je tedy kubická parabola.
jsou polynomy 3. stupně,
Fergusonova křivka je tedy kubická parabola.
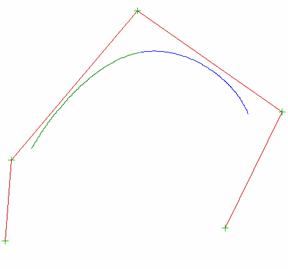
Bézierovy křivky
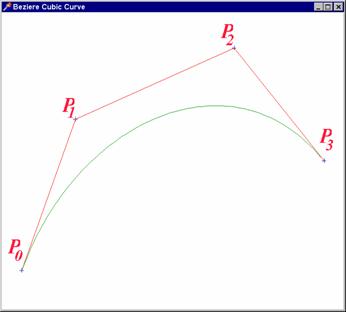
V letech 1959 - 1962 navrhli nezávisle na sobě
P. E. Béziere a P. de Casteljau křivku, která je určena čtyřmi body ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Je
definována parametrickými rovnicemi
. Je
definována parametrickými rovnicemi
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]()
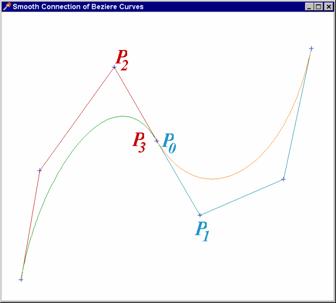
Hladké napojování – je třeba zajistit společnou
tečnu
Coonsovy křivky a B-splajny
Další křivky hojně používané v technické praxi
definoval S. A. Coons. Coonsova kubika je definována opět čtyřmi řídícími body ![]() a kubickými polynomy
a kubickými polynomy ![]() :
:
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]()
Hladké napojování –
opakování prvních tří bodů řídícího polygonu: